Generic Mobility Simulation Framework (GMSF)
Welcome to the Generic Mobility Simulation Framework (GMSF) project website. Using GMSF you can generate mobility traces with our GIS-based mobility model and other mobility models. The Generic Mobility Simulation Framework (GMSF) was developed as a part of a master thesis [1] at ETH Zurich and has been presented at MobilityModels'08, the first ACM SIGMOBILE workshop on Mobility models [2].
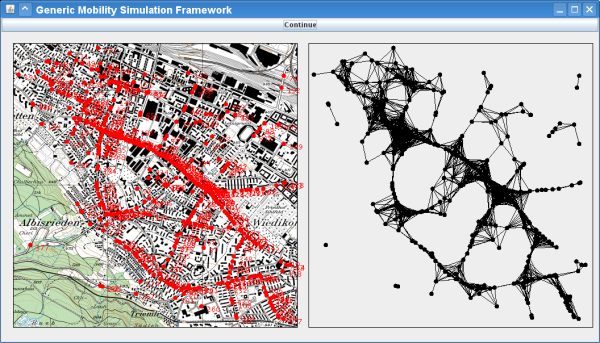
Screenshot of GMSF with the GIS-model in the Urban scenario:
Position of nodes on the map (left side) and the corresponding network graph (right side).
Download GMSF
The source code of GMSF is available in our
SVN repository at sourceforge.net.
Please note: Due to copyright restrictions we are not allowed to release the road information from the Swiss GIS landscape model [
3]. However, you can use your existing road information together with GMSF. It is planned to support the import of maps from OpenStreetMaps in a future release. Trace files for the MMTS mobility model can be found here (
City,
Urban,
Rural).
Mobility Models
The simulation framework contains our new GIS-based mobility model, the MMTS model and the common Random Waypoint and Manhattan models.
- GIS-based mobility model: Steady-state random trips on real road topology from the Swiss geographic information system (GIS) [3]. The model implements a basic car-following mechanism using the Intelligent-Driver Model (IDM) [4]. Additionally, major road intersections are controlled by a simple traffic light model. Mobility traces can be generated based on the road topology of three different areas in Switzerland (City, Urban and Rural scenario)
- MMTS Model: Mobility model which is based on realistic vehicular traces and on the road topology from the Multi-agent Microscopic Traffic Simulator (MMTS) [5]. We provide vehicular traces for three different areas in Switzerland (City, Urban and Rural scenario).
- Random Waypoint Model: Steady-state random trip model. The steady-state initialization is performed using the method described by Camp and Navidi. [6]
- Manhattan Model: Nodes travel on a grid-like road network. If the distance to the front vehicle is below a threshold value, the speed is set at maximum to the speed of the front vehicle. Otherwise, nodes are accelerating or decelerating on a random basis while moving at a speed in the specified range.
More details can be found in the thesis [
1] or in the research paper [
2].
Output Format
Mobility traces can be generated in various output formats. GMSF supports the mobility trace format of the popular ns-2 (incl. nam traces) and Qualnet network simulators. In addition, we offer to generate traces in a simulator independent XML-based trace format.
References
- "Design and Analysis of Realistic Mobility Model for Wireless Mesh Networks", Philipp Sommer, Master Thesis, ETH Zurich, Sept 07. PDF
- "Generic mobility simulation framework (GMSF)", Rainer Baumann, Franck Legendre and Philipp Sommer, MobilityModels '08: Proceeding of the 1st ACM SIGMOBILE workshop on Mobility models, Hongkong, China. PDF
- "VECTOR 25 - Landscape model of Switzerland", The Swiss Federal Office of Topography swisstopo, see website
- "Congested Traffic States in Empirical Observations and Microscopic Simulations", M. Treiber , A. Hennecke and D. Helbing, Physical Review, see paper
- Realistic Vehicular Traces, Laboratory for Software Technology, ETH Zurich, see website
- "Stationary Distributions for the Random Waypoint Mobility Model", W. Navidi and T. Camp, IEEE Transactions on Mobile Computing, Vol. 3, 2004, see paper
- "The IMPORTANT framework for analyzing the Impact of Mobility on Performance Of RouTing protocols for Adhoc NeTworks", F. Bai, N. Sadagopan and A. Helmy, INFOCOM 2003, see paper

